
Die Idee
Seit längerem steuere ich mein Teleskop bereits mit einem RaspberryPI auf dem die Astroberry-Distribution installiert ist.
Hierbei handelt es sich um ein vollständiges Image des Raspbian-Betriebssystems mit allem was man für die Steuerung einer Astrofotografischen Ausrüstung braucht. Aber für Details rate ich die oben verlinkte Quelle zu Rate zu ziehen.
Nachdem ich bereits zwei solcher RaspberryPI hergerichtet hatte, welche jeweils unterschiedliche Anforderungen erfüllten, wollte ich diesmal eine Komplettlösung. Auch um die Verkabelung zu reduzieren.
Der MK1 war ein Modell 3b+, hatte Stromanschlüsse für 4 Peripheriegeräte. Keine Schaltbaren Ausgänge und war bereits über einen StromPI mit 6-30V über Schraubklemmen mit Spannung zu versorgen.
Der MK2 ist ein RaspberryPI 4b mit 4Gb RAM. Ohne Stromverteilung, aber mit aktivem Lüfter, der durch die hohe Rechnerleistung zwingend erforderlich ist. Bei beiden Versionen habe ich bereits sporadisch mit einer Automatischen Fokussierung gearbeitet.
Die Anforderungen
Meine Praxis mit dem EKOS-Betriebssystem und den RaspberryPIs haben mich dazu veranlasst, mir Gedanken um die Anforderungen eines für mich optimal ausgestatteten Steuerrechners für das Telekop zu machen. Folgende Funktionen sollte das System erfüllen:
- Lokales Platesolving
- Bildaufnahme
- Kamerasteuerung
- Guiding
- Guiding
- Eigener HotSpot
- GPS
- Optionaler WLAN-Zugang
- Smarte Steuerung zur Motorfokussierung
- 6 Spannungsanschlüsse
- USB-Hub
- Optionaler zweiter WLAN-Anschluss
Möglicherweise gibt es bereits fertige Lösungen, die alle Ansprüche erfüllen. Aber da fehlt mir der Selbstbau-Anspruch. Dass es nicht leicht wird alles in einem halbwegs kompakten Gehäuse unterzubringen schien immer wahrscheinlicher.
Die Hardware
Der Rechner
Als Basis dient wieder ein RaspberryPI 4b mit 4Gb RAM. Das reicht völlig. Auch das Platesolving läuft damit zuverlässig. Der Flaschenhals bei dem System ist leider das verwendete BUS-System, aber auch hier gibt es im Regelfall kein Problem. Der Rechner stellt zwar einen USB3-Anschluss zur Verfügung, aber da ich nicht mal im Ansatz an die Datenmengen herankomme, die hier möglich wären, habe ich mich dazu entschieden, alles mit USB2 zu betreiben, was sich als völlig ausreichend erwiesen hat. Die Spannungsversorgung über den serienmäßigen 12V-Anschluss finde ich persönlich für einen solchen Rechner als ungeeignet. Zum Glück gibt es hier mit dem JoyIT-StromPI eine Möglichkeit, den RaspberryPI mit einer festen Spannung von 6-30V über zwei Schraubklemmen zu versorgen. Außerdem wurde noch eine Prototypen-Platine aufgesteckt, mit der ich neben dem Lüfter noch verschiedene Ein- und Ausgänge schalten kann.
Der USB-Hub
Dieser soll mir nicht einfach nur die USB-Anschlüsse bereit stellen sondern auch noch mit einer stabilen Spannungsversorgung versehen werden können. Die Modelle mit den schwachbrüstigen 5V-Netzteilen haben sich nach meiner Erfahrung als zu anfällig herausgestellt. Außerdem soll der Host-Anschluss sowie die Versorgungsspannung auf der Rückseite sein. Hier habe ich bereits wiederholt sehr gute Erfahrungen mit den Hubs von EXSYS sammeln können. Daher kam wieder ein Modell davon zum Einsatz, das zufälligerweise alle Anforderungen erfüllt. Leider hat dieser Hub keine Weitbereichs-Spannungsversorgung, sondern nur muss mit einer festen Versorgungsspannung von 12V versehen sein, was aber keine größere Herausforderung darstellt, da die komplette Ausrüstung ohnehin auf 12V läuft.
Die Schrittmotorkarte
Für die Schrittmotorsteuerung habe ich die Stepprocker-Platine TMCM1110 von Trinamic verwendet. Diese kam bereits bei meinem ersten Motorfokussierer zum Einsatz und zeichnet sich durch die Programmierbarkeit für einen Autarken oder auch Teilautarken Betrieb aus. Die Karte kann Motoren mit bis zu 2,56A Strangstrom versorgen und stellt eigene Anschlüsse für Referenzschalter, IOs, PWM und Drehgeber zur und noch einiges andere zur Verfügung. Die für mich interessanteste Eigenschaft ist aber dass ich mit der Herstellereigenen TMCL-Sprache (einer Programmiersprache, die mich sehr hart an einen Assembler erinnert und sehr schnell ist) feste Abläufe auf der Karte selbst hinterlegt werden können und dass ich Motorströme und andere Parameter per Software und sogar per externe Befehle angeben kann. Außerdem kann ich auch diverse Daten in interne Register schreiben, die von Extern abgerufen werde können. So kann ich zum Beispiel den Maximalen Fokussierweg in einem Register ablegen und diesen einfach mit dem Treiber abrufen.
Das GPS
Zu dem GPS gibt es nicht viel zu sagen. Hier wurde ein GPS-GLOSSNAS-Dongle über Amazon erworben, der dann seines Plastikgehäuses beraubt wurde und dann mit im Gehäuse untergebracht werden konnte.
Die Anordnung
Die Komponenten alle kompakt in einem Gehäuse unterzubringen war wohl die größte Herausforderung. Das Gehäuse sollte auf meinem 3D-Drucker hergestellt werden.
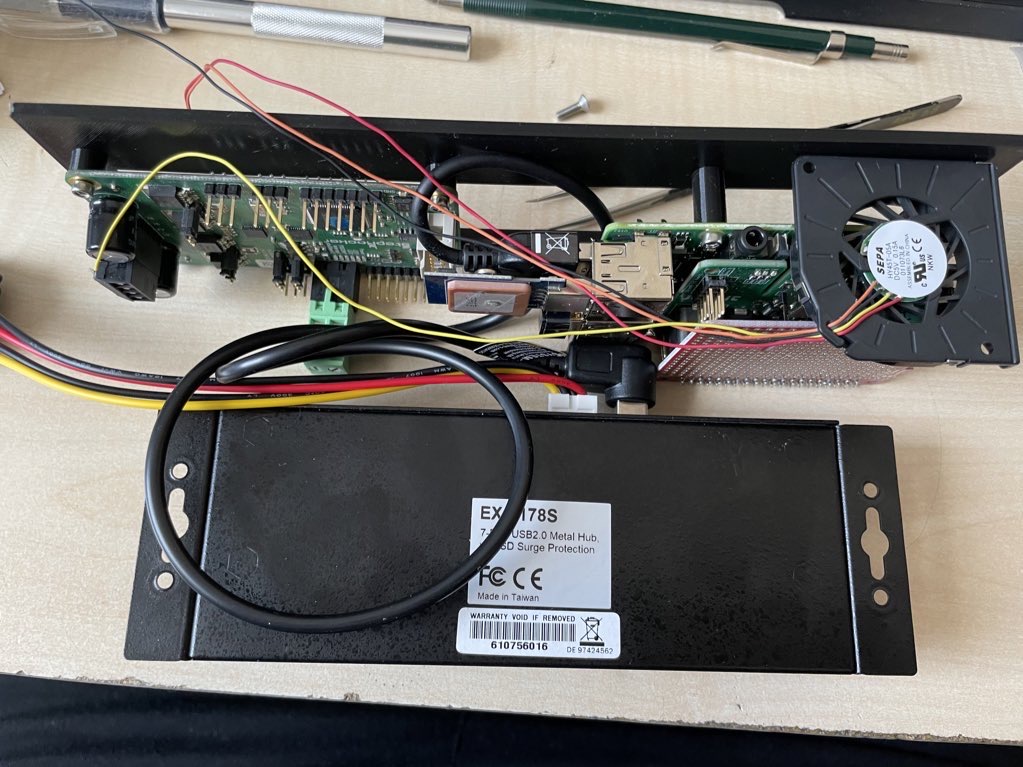
Hinten links sitzt die Schrittmotorkarte. Hinten rechts der RaspberryPI mit eingesteckten GPS-Dongle und den Anschlusskabeln für die Schrittmotorkarte, die über USB angesprochen wird und die zusätzlichen Platinen für die Stromversorgung und die Prototypenplatine.
Oben drauf, vorerst noch sehr provisorisch, liegt der verwendete Lüfter. Dieser könnte etwas Leistungsstärker sein, aber immerhin hat er eine enorm kompakte Bauform. Sollte es ein größeres Redesign geben, könnte der eventuell gegen einen etwas größeren ausgetauscht werden.
Vorne liegt auf dem Kopf der USB-Hub. Wie rum dieser eingebaut wird spielt ja keine Rolle. In dieser Variante waren für mich die Kabel etwas besser zu verlegen. Daher wurde dieser so eingebaut.

Die Verkabelung ist ein klein wenig unaufgeräumt. Das war ein klein wenig der Tatsache geschuldet, dass ich mitunter bereits vorhandene Steckverbinder gewählt habe, welche alle aus dem M12-System für Sensor- und Aktorsteckverbinder stammen, die sich bereits bei mir im Bestand befanden und mitunter schon (wiederholt) in diversen Projekten Verwendung fanden und daher mittlerweile doch eher kurze Anschlussleitungen haben.
Die Verwendung von WAGO-Klemmen wurde gewählt, da ich in diesen ohne Probleme starre und flexible Leitungen miteinander verbinden kann. Außerdem ist deren Platzverbrauch verhältnismäßig klein.
Auf dem Bild ist auch eine Relaiskarte zu erkennen. Aktuell wird nur eines der Relais verwendet. Hier wird vom RaspberryPI abgefragt ob ein Motor an der Schrittmotorkarte angeschlossen ist. Nur wenn dieses der Fall ist, wird die Schrittmotorkarte mit Spannung versorgt. Nur um zu verhindern dass diese ohne Last läuft, weil dann die Treiberstufen schaden nehmen können.
Der Vergleich
Hier habe ich einmal zwei Vergleichsbilder gemacht.

Oben links ist die letzte Ausführung der USB- und Spannungsverteilung zu sehen. Oben mittig ist der MK2-Rechner und daneben das Stromkabel zu sehen. Unten liegt der alte Motorfokussierer mit Paralleler Handsteuerung und daneben die erforderlichen USB- und Spannugnsversorgungskabeln.

Hier ist der MK3v0 zu sehen. Also der erste Prototyp. Kleinere Änderungen wird es noch im Beriech des Gehäuses geben. Aktuell läuft der Rechner in seinem ersten Feldeinsatz und zeigt sich von seiner guten Seite. Ein paar Kleinigkeiten wird es noch geben. Auch diese werden hier an der Stelle angefügt werden.
Falls ihr Fragen habt, schreibt diese einfach in die Kommentare.
1 Pingback